🏆 Featured
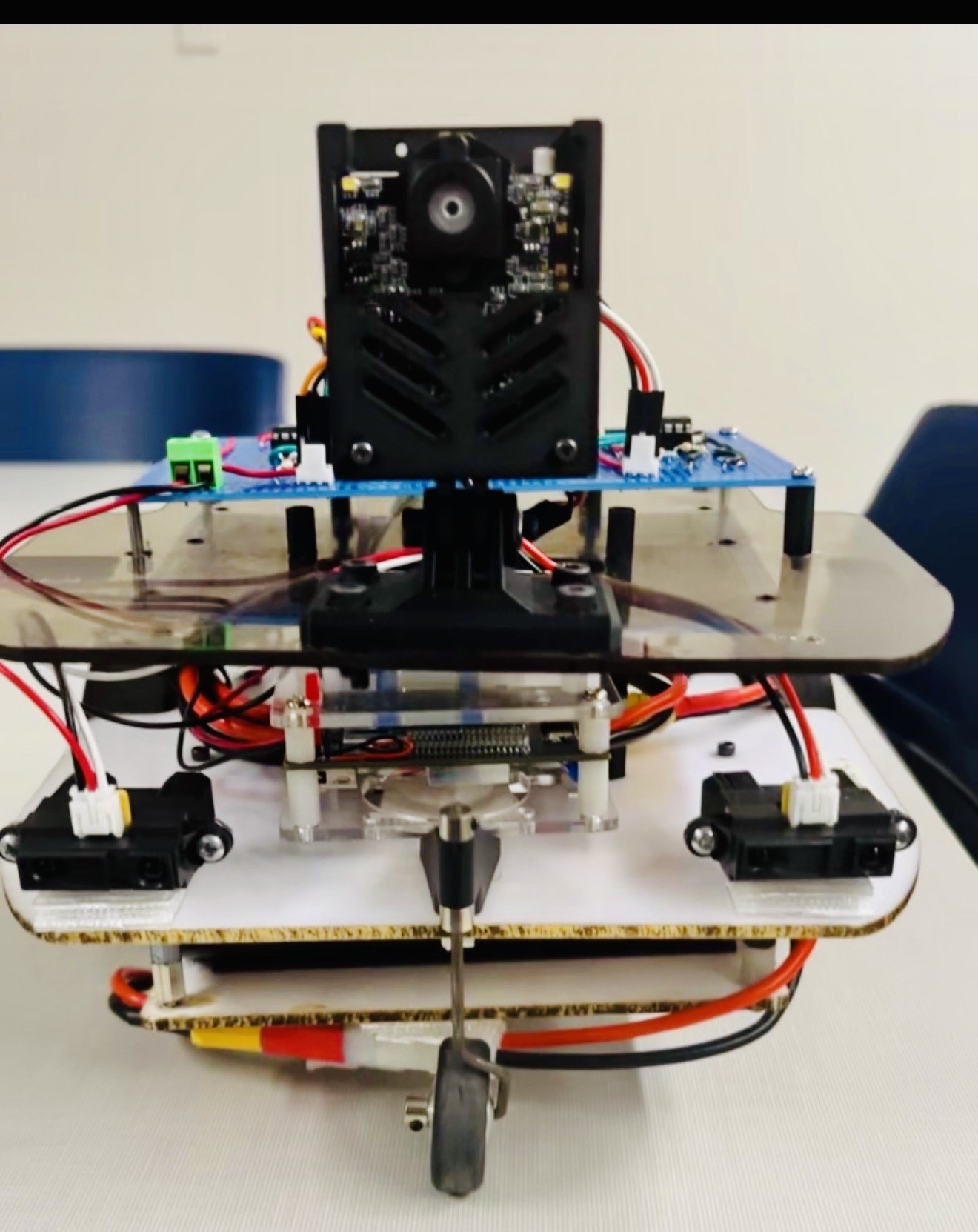
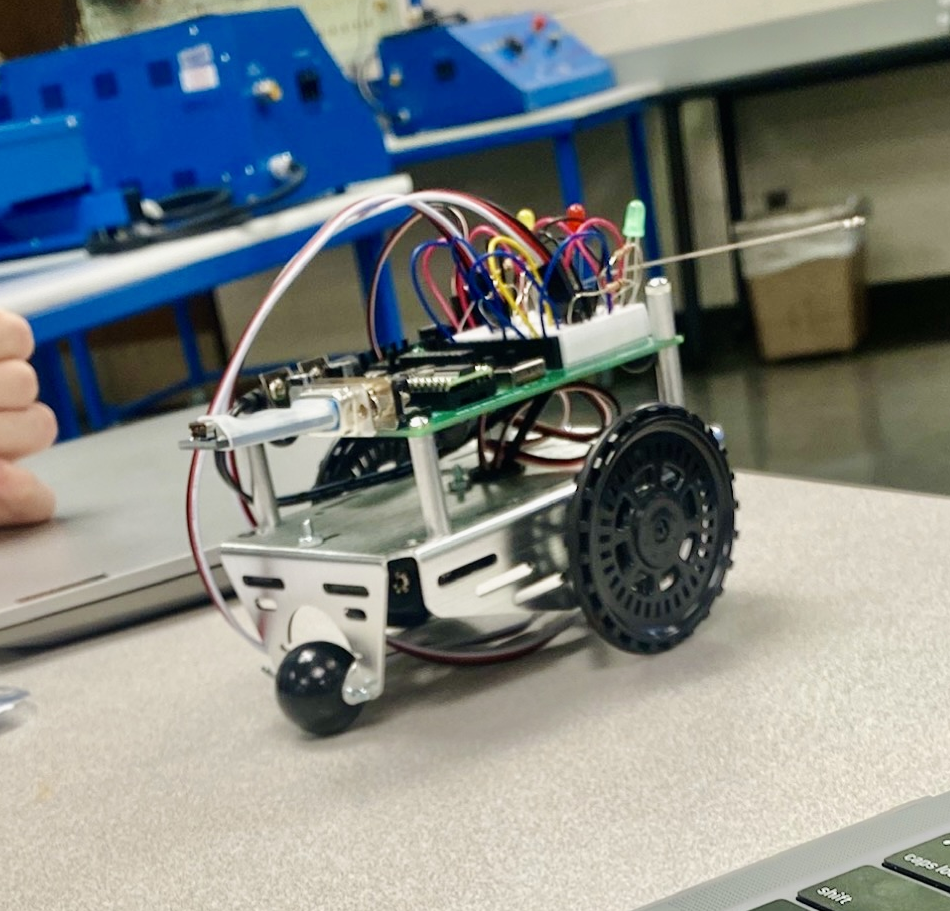
AFROBOT: Autonomous Drive Pet
An autonomous robot demonstrating behavior-based control through subsumption architecture. Integrates analog sensing, embedded control, and motor actuation for real-time navigation.
- Cruise – steady forward motion
- Track – follow dark-green object detection
- Escape – intelligent obstacle avoidance
- Real-time sensor fusion and decision-making
3
Behaviors
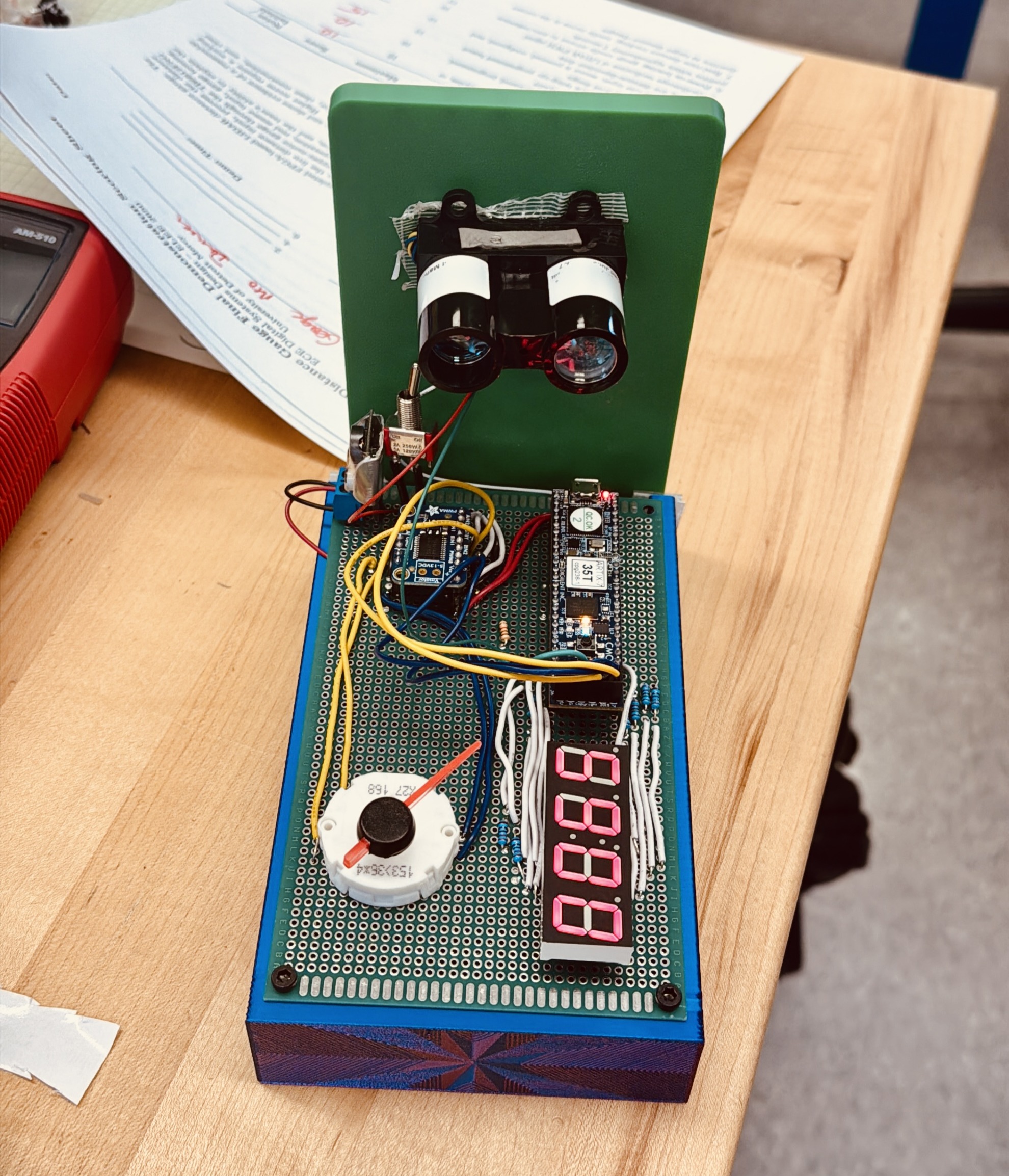
~11cm
Detection Range
1m
Tracking Range